#include <string>#include <cstring>#include "hardware/gpio.h"#include <stdio.h>#include "pico/stdlib.h"#include <algorithm>#include "hardware/i2c.h"import port_pico_reset;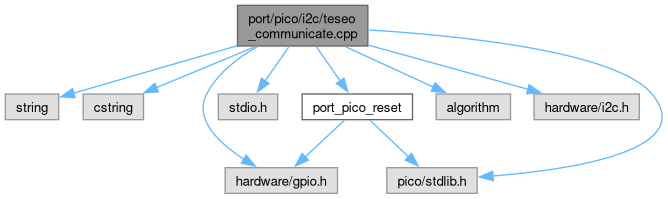
Go to the source code of this file.
Macros | |
| #define | MAX_SATELLITE_REPLIES 7 |
| #define | I2C_PORT (i2c0) |
| #define | I2C_BAUD (100 * 1000) |
| #define | I2C_SDA (16) |
| #define | I2C_SCL (17) |
| #define | I2C_ADDR (0x3A) |
| #define | BUFFSIZE (1024) |
| #define | I2C_FAIL_AFTER_EMPTY_READS (1024U * 4) |
Functions | |
| void | initialize () |
| void | write (const ::std::string &s) |
| void | read (::std::string &s) |
Variables | |
| const size_t | NMEA_MAX_REPLIES = MAX_SATELLITE_REPLIES |
| uint8_t | buf [BUFFSIZE] |
Macro Definition Documentation
◆ BUFFSIZE
| #define BUFFSIZE (1024) |
Definition at line 31 of file i2c/teseo_communicate.cpp.
◆ I2C_ADDR
| #define I2C_ADDR (0x3A) |
Definition at line 30 of file i2c/teseo_communicate.cpp.
◆ I2C_BAUD
| #define I2C_BAUD (100 * 1000) |
Definition at line 27 of file i2c/teseo_communicate.cpp.
◆ I2C_FAIL_AFTER_EMPTY_READS
| #define I2C_FAIL_AFTER_EMPTY_READS (1024U * 4) |
Definition at line 32 of file i2c/teseo_communicate.cpp.
◆ I2C_PORT
| #define I2C_PORT (i2c0) |
Definition at line 26 of file i2c/teseo_communicate.cpp.
◆ I2C_SCL
| #define I2C_SCL (17) |
Definition at line 29 of file i2c/teseo_communicate.cpp.
◆ I2C_SDA
| #define I2C_SDA (16) |
Definition at line 28 of file i2c/teseo_communicate.cpp.
◆ MAX_SATELLITE_REPLIES
| #define MAX_SATELLITE_REPLIES 7 |
Definition at line 23 of file i2c/teseo_communicate.cpp.
Function Documentation
◆ initialize()
|
export |
Definition at line 41 of file i2c/teseo_communicate.cpp.
◆ read()
|
export |
Definition at line 59 of file i2c/teseo_communicate.cpp.
◆ write()
|
export |
Definition at line 54 of file i2c/teseo_communicate.cpp.
Variable Documentation
◆ buf
| uint8_t buf[BUFFSIZE] |
Definition at line 39 of file i2c/teseo_communicate.cpp.
◆ NMEA_MAX_REPLIES
|
export |
Definition at line 37 of file i2c/teseo_communicate.cpp.
Generated by