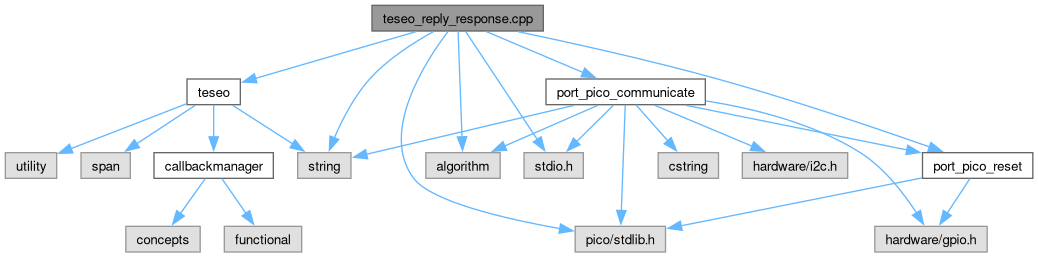
#include <string>#include <algorithm>#include <stdio.h>#include "pico/stdlib.h"import teseo;import port_pico_reset;import port_pico_communicate;
Include dependency graph for teseo_reply_response.cpp:
Go to the source code of this file.
Functions | |
| void | setCallbacks () |
| int | main () |
Variables | |
| teseo::teseo | gps |
| std::string | reply |
| std::array< std::string, NMEA_MAX_REPLIES > | replies |
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 29 of file teseo_reply_response.cpp.
◆ setCallbacks()
| void setCallbacks | ( | ) |
Definition at line 23 of file teseo_reply_response.cpp.
Variable Documentation
◆ gps
| teseo::teseo gps |
Definition at line 14 of file teseo_reply_response.cpp.
◆ replies
| std::array<std::string, NMEA_MAX_REPLIES> replies |
Definition at line 21 of file teseo_reply_response.cpp.
◆ reply
| std::string reply |
Definition at line 15 of file teseo_reply_response.cpp.
Generated by